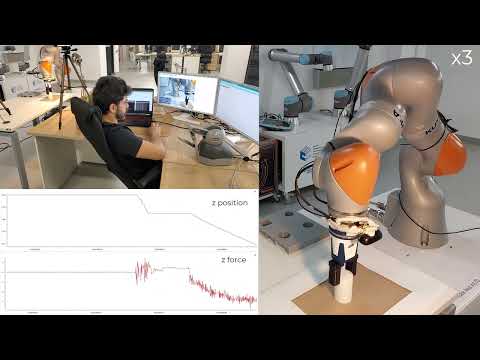
Master’s thesis — Peg-in-hole assembly with four control modes
Innopolis University · KUKA LBR iiwa; vision, haptics, shared autonomy, and learning from demonstration.

Thesis work, laboratory projects, and demos from graduate and undergraduate study.
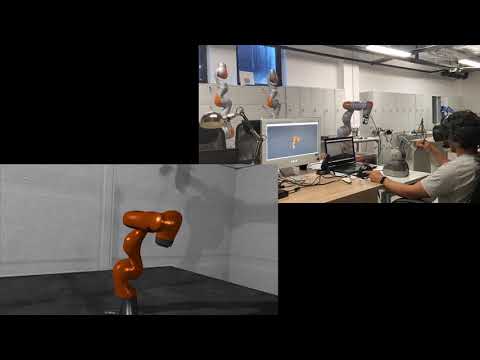
Research arc: cable-driven teleoperation → bilateral KUKA control → VR interface → peg-in-hole with haptics → four-mode thesis benchmark.
Innopolis University · KUKA LBR iiwa; vision, haptics, shared autonomy, and learning from demonstration.

Innopolis University · teleoperation with force feedback and impedance compliance for tight-clearance insertion.
Innopolis University · ROS, KUKA Sunrise, Unity, Samsung HMD, and Touch haptic feedback.

Innopolis University · Cartesian and joint mapping with endeffector force reflection.

Innopolis University · 10×7 m cable robot; Touch haptic device; websockets; Omron PLC; Go kinematics.
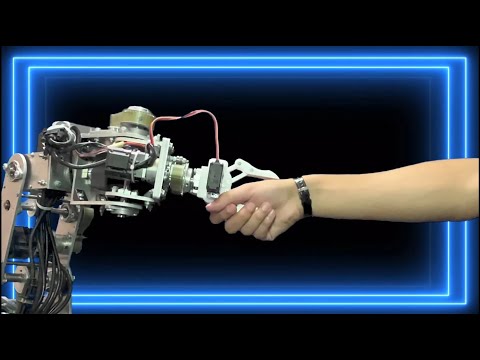
Nile University · custom 7-DOF arm (designed and built in-house); VR and ROS teleoperation; 1st IoT & AI Egypt.