Tele-Operated VR control of a Self-Aware robot in a hostile environment
Bachelor Graduation Project 

Bachelor Graduation Project
Intelligent Robotic System Lab Project 
Internship Project 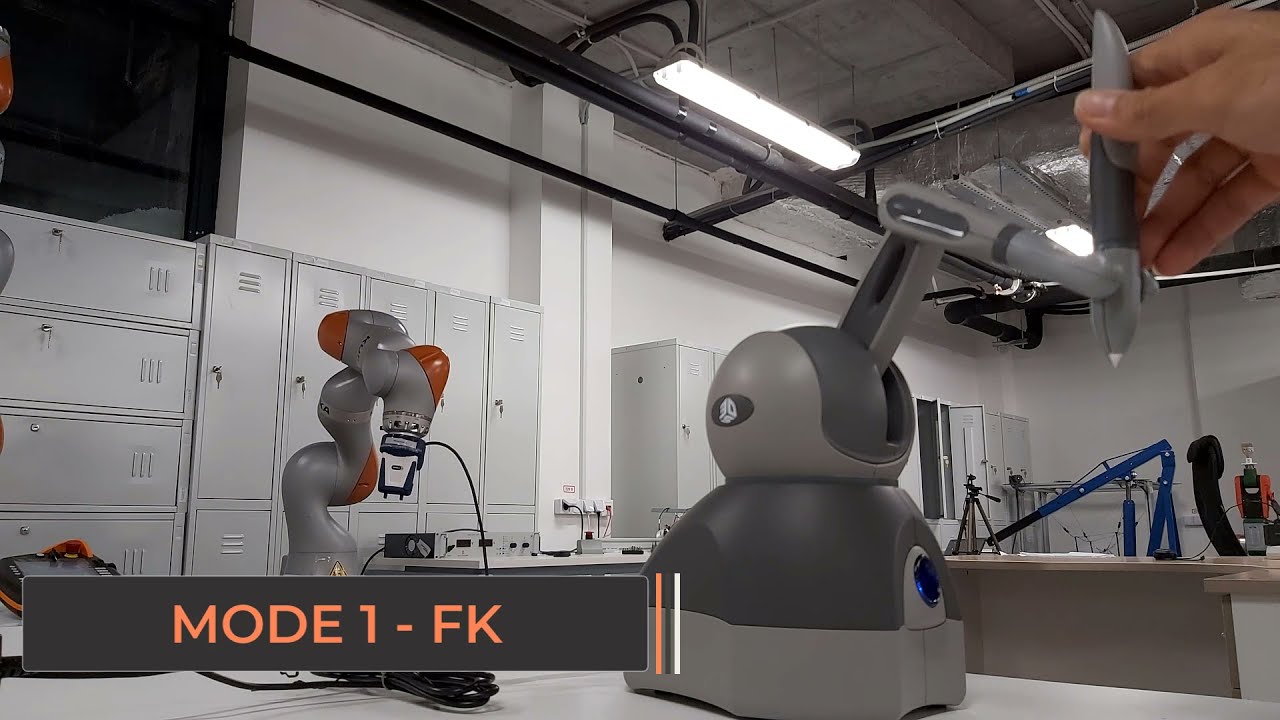
Teleoperation of Kuka iiwa Robotic arm using Touch Haptic device in VR 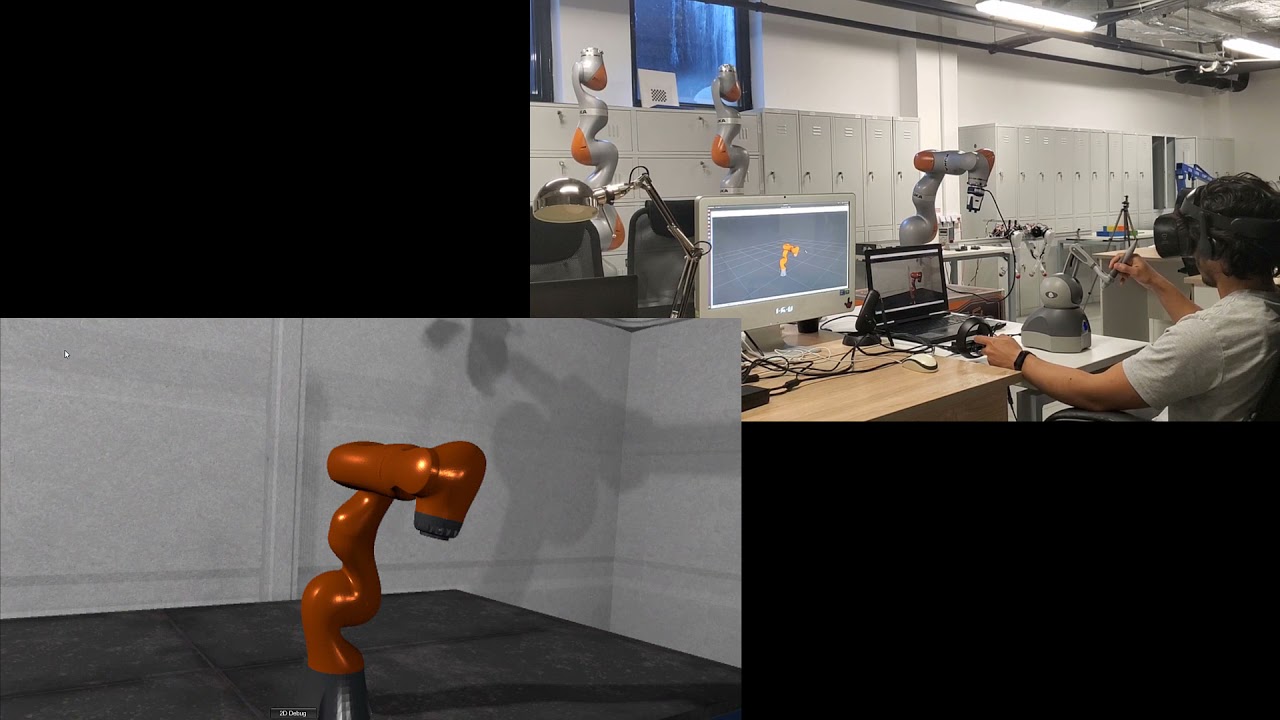
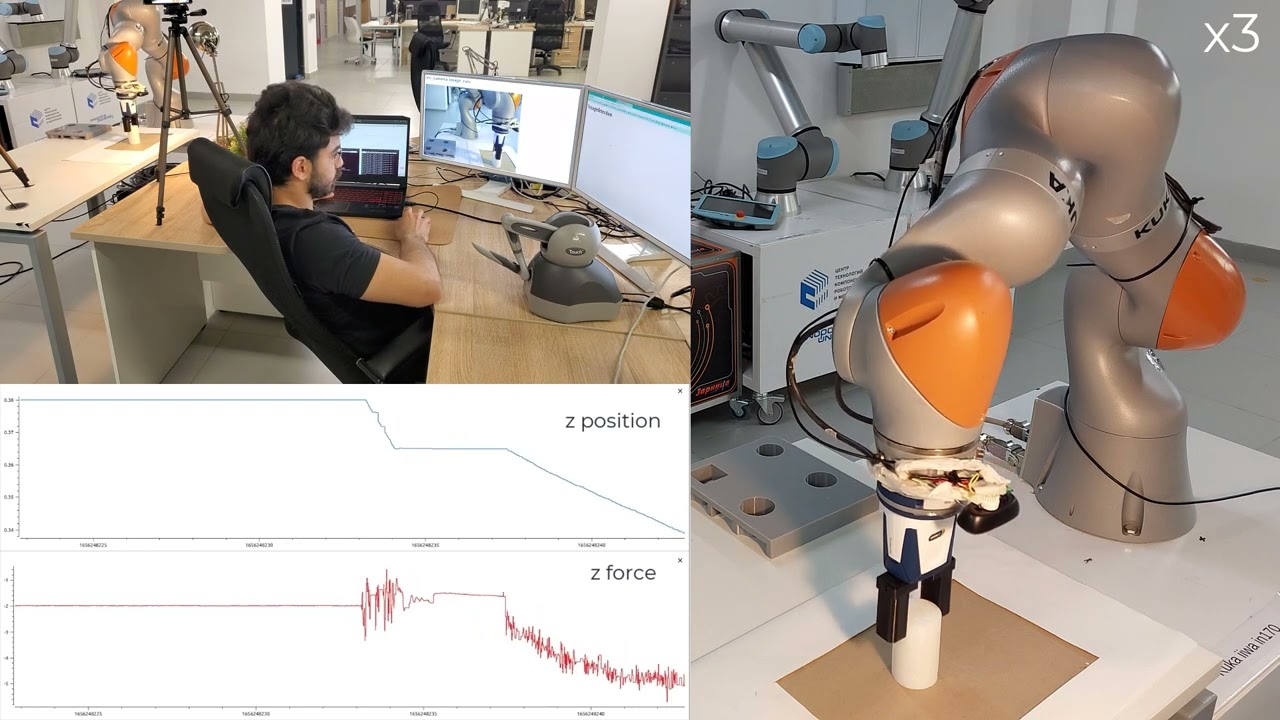
Fully Tele-Operated Peg-in-hole task with Touch Haptic and kuka iiwa with force feedback
Master Graduation Project