Tele-Operated VR control of a Self-Aware robot in a hostile environment
Bachelor Graduation Project 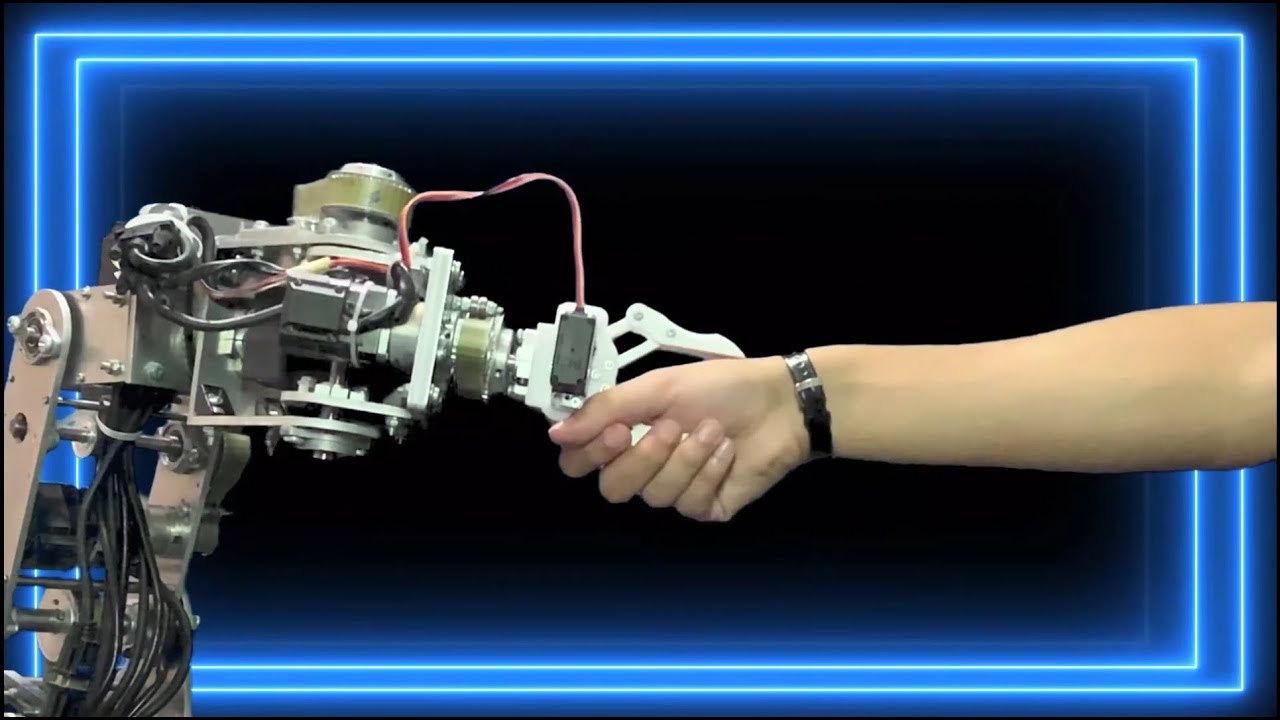

Bachelor Graduation Project
Intelligent Robotic System Lab Project 
Internship Project 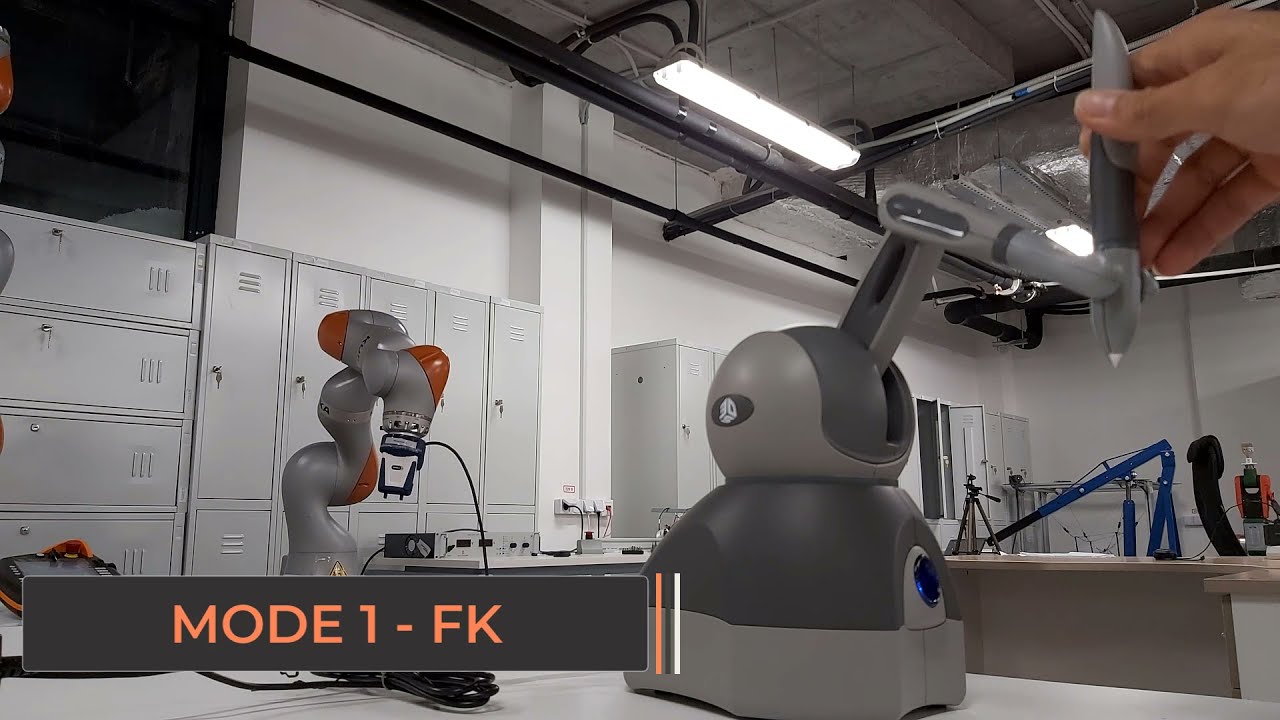
Teleoperation of Kuka iiwa Robotic arm using Touch Haptic device in VR 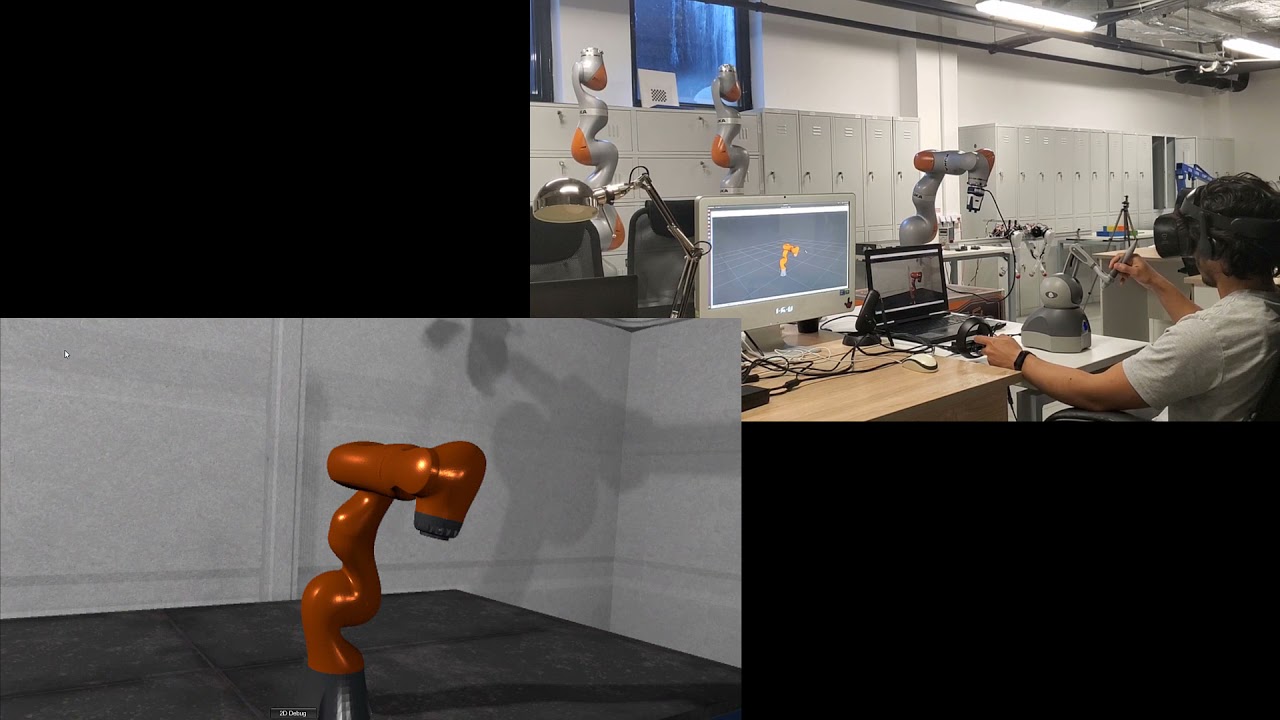
Fully Tele-Operated Peg-in-hole task with Touch Haptic and kuka iiwa with force feedback
Master Graduation Project 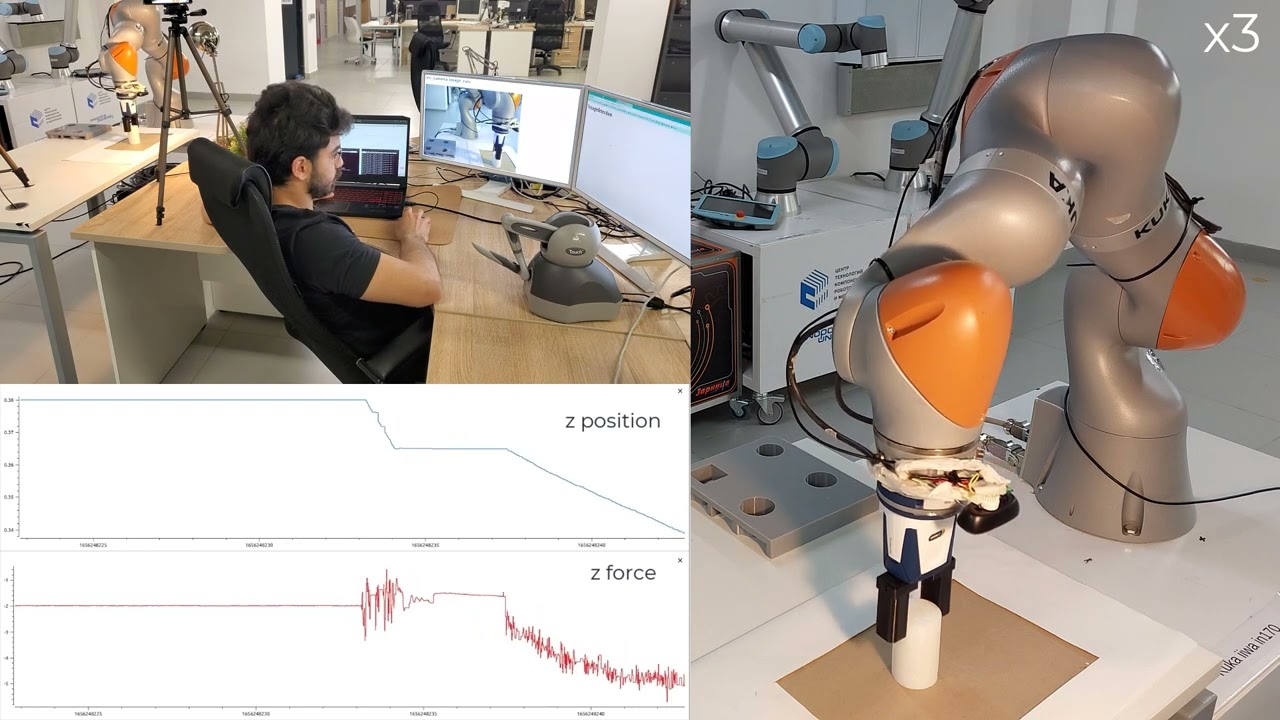
Published in 2021 International Conference "Nonlinearity, Information and Robotics" (NIR), 2021
Recommended citation: K. Almaghout, R. A. Boby, M. Othman, A. Shaarawy and A. Klimchik, "Robotic Pick and Assembly Using Deep Learning and Hybrid Vision/Force Control," 2021 International Conference "Nonlinearity, Information and Robotics" (NIR), 2021, pp. 1-6, doi: 10.1109/NIR52917.2021.9666138 https://ieeexplore.ieee.org/abstract/document/9666138
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.